|
|
Cette
derniŤre question aborde le problŤme de la mesure des vitesses de
rotation, problŤme d'une grande importance dans le domaine de la
navigation inertielle. On peut citer notamment l'esemple des satellites
dont l'orientation est cruciale afin garantir elur bon fonctionement.
L'emploi du laser peut permettre de mesurer de faibles vitesses
angulaires et ansi de pouvoir dťtecter de petits mouvements de rotation.
Dans ledomaine de la navigation, ces dispositifs tendent d'aileurs peu ŗpeu ŗ supplanter les gyroscopes mťcaniques.
Effet Sagnac.
Cet
effet, dťcouvert par Sagnac en 1914, permet de mesurer, par une
mťthode optique, la rotation d'un rťfťrentiel par rapport ŗ un
rťfťrentiel galilťen. L'analyse ci-dessous a pour objet de prťsenter
qualitativement cet effet puis de faire un calcul plus prťcis sur le
dispositif de la figure 10.
Schťma de principe.
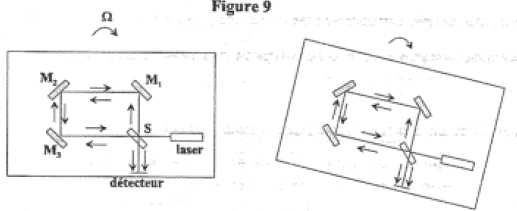
La
sťparatrice S divise le faisceau laser en deux sous-faisceaux qui
circulent ainsi en contre-sens dans la boucle rectangulaire dťlimitťe
par les miroirs M1, M2 et M3. AprŤs un nouveau passage ŗ travers S les faisceaux sont recombinťs et analysťs par le dťtecteur.
l'expťrience montre qu'une rotation de vitesse angulaire W modifie l'enregistrement. La mesure associťe ŗ cette modification, permet de dťterminer la valeur de la vitesse de rotation.
Aspect quantitatif.
On
considŤre un gyroscope ŗ fibre optique ŗ l'intťrieur duquel des rayons
lumineux, produits par un laser de longueur d'onde ťgale ŗ 633 nm, ne
sont pas guidťs par des rťflexions sur des miroirs mais sont canalisťs
par des fibres optiques.
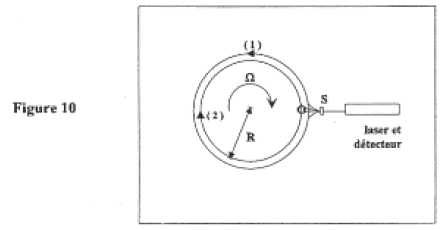
S
a pour rŰle de diviser le faisceau laser en deux faisceaux circulant en
sens inverse. AprŤs un tour, les signaux sont recombinťs par S et
analysťs par le dťtecteur. les raisonnements sont conduits dans le
rťfťrentiel du laboratoire R supposť galilťen, dans lequel la lumiŤre
voyage ŗ la vitesse c.
|
.
.
On considŤre les rayons lumineux entrant dans la fibre en O ŗ l'insatnt t=0.
Morsque
le rayon 1 se propage, puisqu'il circule en sens inverse de la rotation
globale du dispositif, le trajet qu'il doit parcourir pour retrouver le
point O est, dans R, infťrieur ŗ un tour. Au contraire, le rayon 2 qui
circule dans le mÍme sens que le sens de rotation global, parcourt,
dans R, un peu plus d'un tour avant d'atteindre ŗ nouveau le
point O.
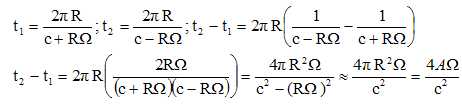
Montrer, qu'en bonne approximation, le dťcalage entre les deux temps de propagation pour revenir en O est 4AW / c2.
A reprťsente l'aire de la surface de la boucle de l'instrument.
On
admettra que ce rťsultat se gťnťralise ŗ d'autres configurations
gťomťtriques ŗ condition que A reprťsente l'aire de la surface de la
courbe fťrmťe dťcrite par la lumiŤre.
Ce dťcalage temporel est associť ŗ une diffťrence de trajet dL = c dt.
La capacitť du dťtecteur ŗ mesurer cette diffťrence de trajet est liťe
intrinsŤquement ŗ la longueur d'onde du rayonnement utilisť.
Calculer la plage des vitesses angulaires accessibles par cette mťthode. A = 1 m2 ; dL supťrieure ou ťgale ŗ 1 nm.
dt = t2-t1 = dL/c ; c2 dt = 4AW ; c dL = 4AW ; W = c dL / (4A)
W =3,0 108 *10-9 /4) =7,5 10-2 rad/s.
On peut mesurer des vitesses de rotation supťrieures ou ťgales ŗ 0,075 rad/s.
Comment pourrait-on accroÓtre les performances de ce dispositif ?
En augmentant A, on pourra mesurer des vitesses de rotation encore plus faibles.
|
|